Backdrivable Kinematically Redundant (6+3)-DOF Hybrid Parallel Robot –Part 2:Human–Robot Interaction

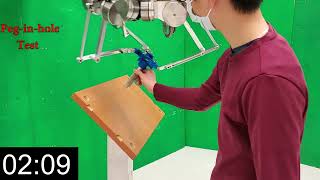
This video demonstrates the operation of a novel kinematically redundant (6+3)dof spatial hybrid parallel robot in a context of physical humanrobot interaction. Human intention is detected without using any other sensor than the motor encoders thanks to the backdrivability. The user freely moves and guides the robot to any configuration in its workspace. The demonstration of virtual walls shows the potential of using this robot in haptics applications. Finally, a user can very intuitively teach the robot some target points for pickandplace tasks.
Links to related research articles :
The robot design and analysis (ICRA2019) : https://ieeexplore.ieee.org/document/...
The forward kinematic analysis (Journal of Mechanisms Robotics2020) : https://asmedigitalcollection.asme.or...
The robot analysis and control strategy for applications in pHRI: (TRO2020 Under Review)
Link to related video:
Trajectory control : • Backdrivable Kinematically Redundant ...