Agile eye

THE AGILE EYE
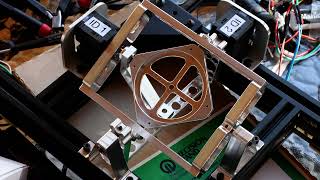
The Agile Eye is a 3DOF 3RRR spherical parallel manipulator developed for the rapid orientation of a camera. Its mechanical architecture leads to high velocities and accelerations. First, the kinematic model of this manipulator was developed. Then, a geometric optimization was carried out in order to determine the dimensional parameters which would produce the best accuracy for the mechanism. A complete dynamic model was then established. Finally, a prototype was designed and built, and a highperformance controller based on a DSP was developed. The prototype was built in 1993 and has been gaining in popularity ever since.
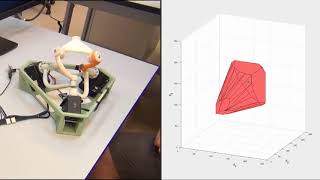
The workspace of the Agile Eye is superior to that of the human eye. The miniature camera attached to the endeffector can be pointed in a cone of vision of 140° with ±30° in torsion. Moreover, due to its low inertia and its inherent stiffness, the mechanism can achieve angular velocities above 1000 °/sec and angular accelerations greater than 20000 °/sec2 which is beyond the capabilities of the human eye.
One of the most interesting topics of research related to the Agile Eye is the analysis of its singularities. Surprisingly, the singularity loci of the Agile Eye are independent from the chosen branch (there are a total of 8 branches). Note that for general 3RRR spherical parallel manipulators, the singularity loci are strictly dependent on the chosen branch. In addition, in the Agile Eye, there exist four poses for the mobile platform in which arbitrary finite motions of the actuators do not produce any output at the mobile platform. Finally, the direct kinematic problem of the Agile Eye allows 8 assembly modes.
This video clip shows the available degrees of freedom and different types of trajectories, slowly and rapidly.
This video shows the agile eye.
OEIL AGILE
L'oeil agile est un mécanisme parallèle sphérique à 3 ddl de type 3RRR qui a été développé pour l'orientation rapide d'une caméra. Son architecture mécanique permet d'atteindre de très grandes vitesses opérationnelles. Premièrement, le modèle cinématique de ce manipulateur a été développé. Ensuite, une optimisation géométrique a été effectuée afin de déterminer les paramètres dimensionnels qui produisent la meilleur précision pour ce mécanisme. Un modèle dynamique complet a aussi été élaboré. Finalement, un prototype a été conçu et construit et un contrôteur haute performance basé sur un DSP a été mis au point. Le prototype a été construit en 1993 et depuis sa popularité n'a pas cessée de grandir.
L'oeil agile possède un espace atteignable en orientation supérieur à celui de l'oeil humain. La caméra miniature attachée à l'organe terminal peut être pointée dans un cône de vision de 140 degrés avec ±30 degrés en torsion. De plus, en raison de sa faible inertie et de sa raideur inhérente, le mécanisme peut atteindre des vitesses angulaires supérieures à 1000 degrés par seconde et des accélérations angulaires supérieures à 20 000 degrés par seconde carrée, ce qui est largement audelà des possibilités de l'oeil humain.
Un des sujets de recherche des plus intéressants sur l'oeil agile est l'analyse de ses singularités. Étonnamment, les lieux de singularité de l'oeil agile sont indépendants de la branche de solution choisie (il y a 8 branches de solutions pour le PGI). À noter que pour un manipulateur plan de type 3RRR, les lieux de singularités sont strictement dépendants de la branche de solution choisie. De plus, pour l'oeil agile, il existe quatre orientations de la plateforme mobile pour lesquelles un mouvement arbitraire des actionneurs ne produit aucun mouvement à l'effecteur. Pour ce qui est du problème géométrique direct, l'oeil agile possède 8 modes d'assemblage.
Cette vidéo illustre les différents degrés de liberté possibles et les déplacements selon plusieurs types de trajectoires, à vitesse lente et rapide.
Pour l'article scientifique,
For the scientific article,
http://ieeexplore.ieee.org/xpl/articl...
Pour plus d'information,
For more information,
http://www.robot.gmc.ulaval.ca/