Grow your YouTube channel like a PRO with a free tool

2.3 Rotations in 3D

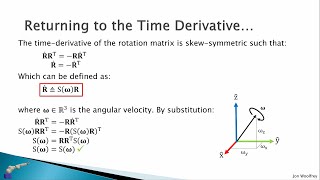
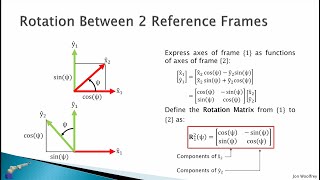
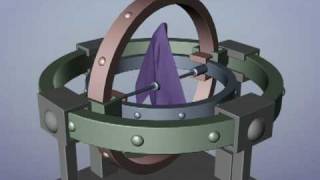
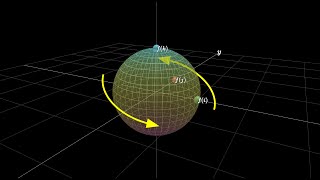
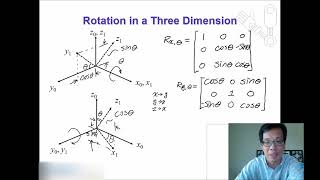
In this lecture, I extend the 2D rotation matrix of SO(2) from Lecture 2.2 to SO(3). Rotation matrices can be constructed from elementary rotations about the X, Y, and Z axes. I also cover the problem of Gimbal Lock, and how to express rotation error.













Recommended







