DIY quadruped robot walking gait (+turning +side trotting)
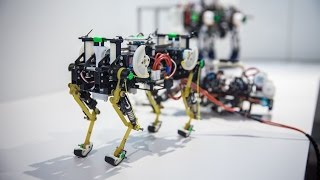
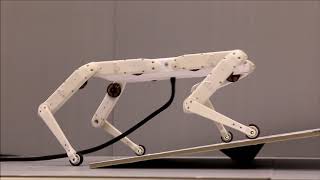
Walking gait of my DIY robot dog (aka mechDOG). It is based on Arduino and the new Lynxmotion Smart Servos. The chassis was handcrafted with aluminum and there are other parts also handcrafted with high impact polystyrene. The legs are completely made with brackets from the new Lynxmotion Servo Erector Set (SES V2).
It is very stable and functional. There are still many improvements to make, but I am happy with the progress so far.
Each leg has 3x ST1 servos (Lynxmotion Smart Servos) and they are controlled by an Arduino Uno and a Lynxmotion LSS Adapter Board.
LSS ST1 servos: https://www.robotshop.com/en/lynxmoti...
LSS Adapter Board: https://www.robotshop.com/en/lynxmoti...
More info about this project @ https://www.robotshop.com/community/f...