Get YouTube subscribers that watch and like your videos

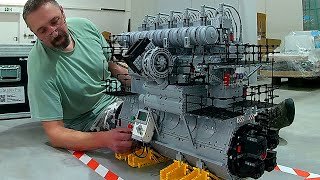
BigMech (quadruped robot with experimental legs) - remote control demo
Quadruped robot with experimental legs using 12x LSS ST1 (Lynxmotion Smart Servos) and Arduino.
Remote control demo with custom remote built with LEGO and Arduino.



















Recommended







