Underactuated Finger Closing Motion Control Using Dual Drive Actuation
Underactuated Finger Closing Motion Control Using Dual Drive Actuation
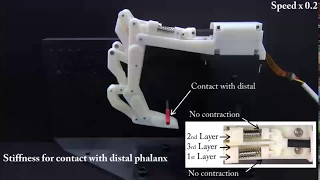
In this video, we illustrate a novel technique to prescribe and control the closing motion of a linkagedriven underactuated finger using two different inputs (actuators). Using an architecture of underactuated finger where these inputs can be actuated from to the base, a design is generated through suitable optimization. It can close with either a pinching or enveloping motion depending on which of its two inputs is actuated. No control or sensing, i.e. feedback control, is required other than driving the right input to achieve the desired closing motion.
Based on:
Underactuated Finger Closing Motion Control Using Dual Drive Actuation, by JeanMichel Boucher and Lionel Birglen, ASME 2015 International Design Engineering Technical Conferences, Boston, MA, USA, August 2015.
Soundtrack: Crispy by Silent Partner, Youtube Audio Library (Youtube free sample library)