It was never so easy to get YouTube subscribers

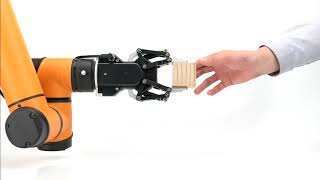
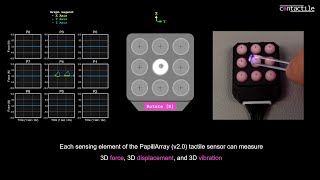
Tactile Sensor-Enabled Gripping - How it works

Offtheshelf grippers must be preprogrammed with the grip parameters for each unique item to be handled, and cannot adapt to changes in the object properties such as weight.
With our tactile sensors, the grip parameters are determined in realtime, and an optimal grip force is applied dynamically. Preprogramming is no longer required just tell the gripper to grip and the sensor feedback will take care of the rest!


















Recommended







