The easiest way to skyrocket your YouTube subscribers

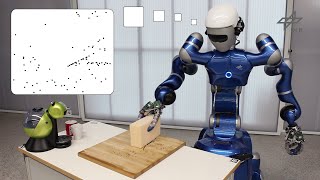
Grasping with the DLR Hand Arm System

The video, taken at Automatica 2014 Munich, demonstrates the execution of a two armed manipulation scenario. First, the object is localized using a combination of imagine processing and point cloud processing. The left arm drive to pick the object and the hand, equipped with two finger tactile sensors, detects the object and triggers the grasping process. The grasp is actively balanced by a controller that uses the measured contact forces (amplitude and direction). In a second step, the right arm is grabbing the object using a simple closing command. Thanks to the impedance controller, the fingers are conforming to the object.
www.robotic.de\hasy






![[BizTech KOREA] Biomimetic robotic hands [#Hash_Tech]](https://i.ytimg.com/vi/nbpS6fOUau8/mqdefault.jpg)









Recommended







