Easy way to get 15 free YouTube views, likes and subscribers

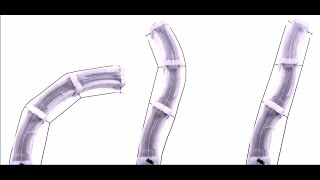
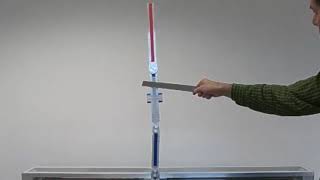
A Lightweight Modular Segment Design for Tendon-Driven Continuum Robots

Puspita Triana Dewi, Priyanka Rao, and Jessica BurgnerKahrs: A Lightweight Modular Segment Design for TendonDriven Continuum Robots with PreProgrammable Stiffness. IEEE International Conference on Soft Robotics , 2024.


![[Nature Communications] Snailinspired robotic swarms](https://i.ytimg.com/vi/aNw92VlH3rA/mqdefault.jpg)















Recommended